Zhe Zhang and Yongchang Zhang
Electrical Engineering Design Method Based on Neural Network and Application of Automatic Control System
Abstract: The existing electrical engineering design method and the dynamic objective function in the application process of automatic control system fail to meet the unbounded condition, which affects the control tracking accuracy. In order to improve the tracking control accuracy, this paper studies the electrical engineering design method based on neural network and the application of automatic control system. This paper analyzes the structure and working mechanism of electrical engineering automation control system by an automation control model with main control objectives. Following the analysis, an optimal solution of controllability design and fault-tolerant control is figured out. The automatic control power coefficient is distributed based on an ideal control effect of system. According to the distribution results, an automatic control algorithm is based on neural network for accurate control. The experimental results show that the electrical automation control method based on neural network can significantly reduce the control following error to 3.62%, improve the accuracy of the electrical automation tracking control, thus meeting the actual production needs of electrical engineering automation control system.
Keywords: Automatic Control , Electrical Engineering Design , Fault Tolerant Control , Neural Network
1. Introduction
Electrical engineering automation is essential for industrial production. Electrical industry tries to replace more manual operations with various control processes in production. This process is called the electrical engineering production automation, which means an electrical engineering production process without human operation. Electrical engineering mechanization is developing rapidly in China. Over the recent years, the development of electrical engineering mechanization around the world has focused on artificial intelligence (AI). Meanwhile, the collaborative development of AI technology and other fields is imminent [1,2]. Electrical engineering informatization has a great potential for driving the development of industrial automation.
With the increasing complexity and control scale, electrical engineering control system commonly have multivariable characteristics. As a result, traditional control approach fails to meet the bar of today’s electrical engineering production, while new problems and challenges of modern industrial control emerge. The author [3] builds a design scheme of intelligent electrical automation control system with the intelligent technology. First, the expert intelligent control algorithm helps get the real-time operating parameters of electrical equipment to compare with data from the database. If the comparison results are inconsistent, the digital expert experience processing method will be started to provide feedback to the console. However, the above method fails to build a completed and accurate model for the monitored and diagnosed electrical engineering automation control system. In addition, it is difficult to accurately describe complex dynamic behavior, noise, interference and other factors. Therefore, in order to realize the precise control of the system, this paper applies neural network to electrical engineering design and automation control system. On top of that, an electrical engineering design method based on the neural network is proposed.
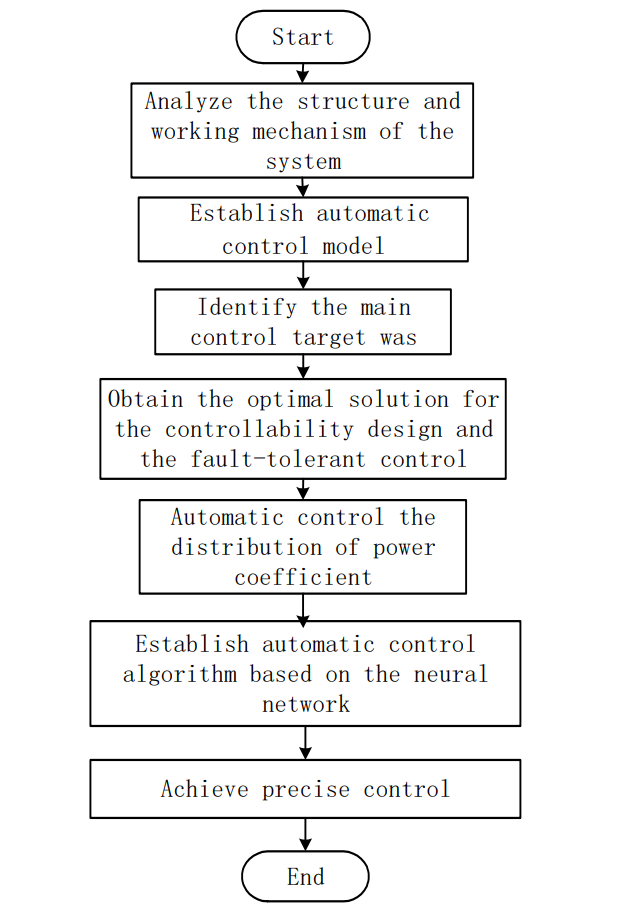
The core research content of this article is shown in Fig. 1.
2. Electrical Engineering Design Method Based on Neural Network and Application of Automatic Control System
2.1 Modeling of Electrical Engineering Automation Control System
To research the distribution strategy and fault-tolerant control of electrical engineering automation control system, it is necessary to analyze the structure and working mechanism of electrical engineering automation control system, and establish an automation control model correspondingly. The data acquisition mechanism covers different types sensors, such as flow sensor, liquid level sensor, temperature sensor and pressure sensor, which converts analog signals in various production into electrical signals and inputs them into the automatic control system [4]. At present, the automatic control system adopts the same components in the process of development, including the battery pack for energy storage and system power supply, motor for braking energy recovery in braking process, and a controller for monitoring braking status and controlling braking force distribution [5]. In this paper, permanent magnet synchronous motor (PMSM) is selected as the main component of braking energy recovery. Due to its fast torque response, high precision and good power density, PMSM is selected as the driving component based on its overall performance better than most motors [6]. When the motor running speed reaches the maximum value of the project target, it is denoted as the formula below:
In Formula (1), [TeX:] $$\alpha_{\max }$$ represents the maximum speed; β is the transmission ratio; ε represents the reduction ratio of the main reducer; μ is the maximum value of the project target; r is the rotation radius. According to the analysis of motor power, the its design should meet electrical engineering objectives. The specific requirements are put forward based on acceleration condition and the maximum speed condition respectively. The following formula should be reached:
In Formula (2), w is the maximum power; a represents the working efficiency of the motor; f represents the distance from the center of mass to the front axle; c represents the maximum torque of the motor; v represents the rotation angle of the motor; m is the quality of the motor. Based on the above analysis, a PMSM model is established to simulate the speed torque relationship of PMSM. In order to further determine the power distribution and fault-tolerant control, it is necessary to analyze the objectives of automation control [7]
2.2 Set the Automatic Control Target of Electrical Engineering Design
The control system becomes increasingly complex as automation control system is widely applied in practical electrical engineering application. In order to solve actuator fault, sensor fault and other component fault, fault diagnosis technology and fault-tolerant control are developed rapidly. Given the development, it is necessary to set a main control objective to optimize the solution of controllability design and fault-tolerant control. Accordingly, it is necessary to make the following assumptions: in the design process, the output vector and state vector are measurable and available at any step. This assumption ensures the availability of the input and output data of the automatic control system. In the research, neural network will estimate the optimal controller and cost function bed [8]. The assumption is to stabilize the nonlinear system in the presence of faults through designs of different fault-tolerant controllers. In contrast, the automatic control objective based on this assumption not only stabilizes the automatic control system with faults, but also achieves the optimal control performance. If the output vector and state vector are not measurable, the observer or filter will be used to estimate the system state [9]. This paper sets the ideal state trajectory as the automatic control target of electrical engineering design. The error of trajectory tracking is denoted as:
In Formula (3), u represents the tracking error; x represents the input signal; i represents the state vector; o is the output vector; n represents the control steps. When the state variables of the system are unbounded, the above constraints on the control objective function can be removed. In the research of fault-tolerance control, it is very important to optimize the cost function or performance index of the control system. In the previous fault-tolerant control, the optimal fault-tolerant controller performance is designed on condition that the performance index is set in advance. However, the performance index will change with different operating conditions. In order to optimize performance indicators, the cost function will be defined by evaluation network approximation. The calculation formula for the cost function is as follows:
In Formula (4), c represents the long-term cost function; θ is discount factor; h is positive semi-definite function; g is positive definite function; ω is the optimal control state; q is a symmetric positive definite matrix. In actual practices of electrical engineering, the reference output signal is determined by the designer, so we can choose the signal that meet the conditions as the ideal output. At the same time, the following objectives are achieved: (1) the minimum cost function is established to produce an approximate optimal fault-tolerant control strategy [10]; (2) the output of the system can quickly track the upper ideal trajectory, and all signals of the closed-loop MIMO system are uniformly bounded [7].
2.3 Distributing Dynamic Coefficient of the Automatic Control System
The dynamic coefficient of the automatic control system is allocated according to the ideal state of automatic control power distribution. As required, the system motor should be in the critical state, or reaches the requirement in the formula:
In Formula (5), λ represents the power distribution coefficient of the control system; s is control intensity; h represents the distance from the center of mass to the motor; l is the height of the center of mass. Leveraging the inequation above, we can get the relationship limit range of control power distribution coefficient under no-load and full load conditions, respectively [11-13]. In the conventional cycle condition of the motor, the control strength is basically around 0.15. According to the above analysis, when the control strength is less than 0.15, the required safety performance reaches the requirement, so it can be entirely controlled by the front axle [14-17].
2.4 Automatic Control Algorithm Based on Neural Network
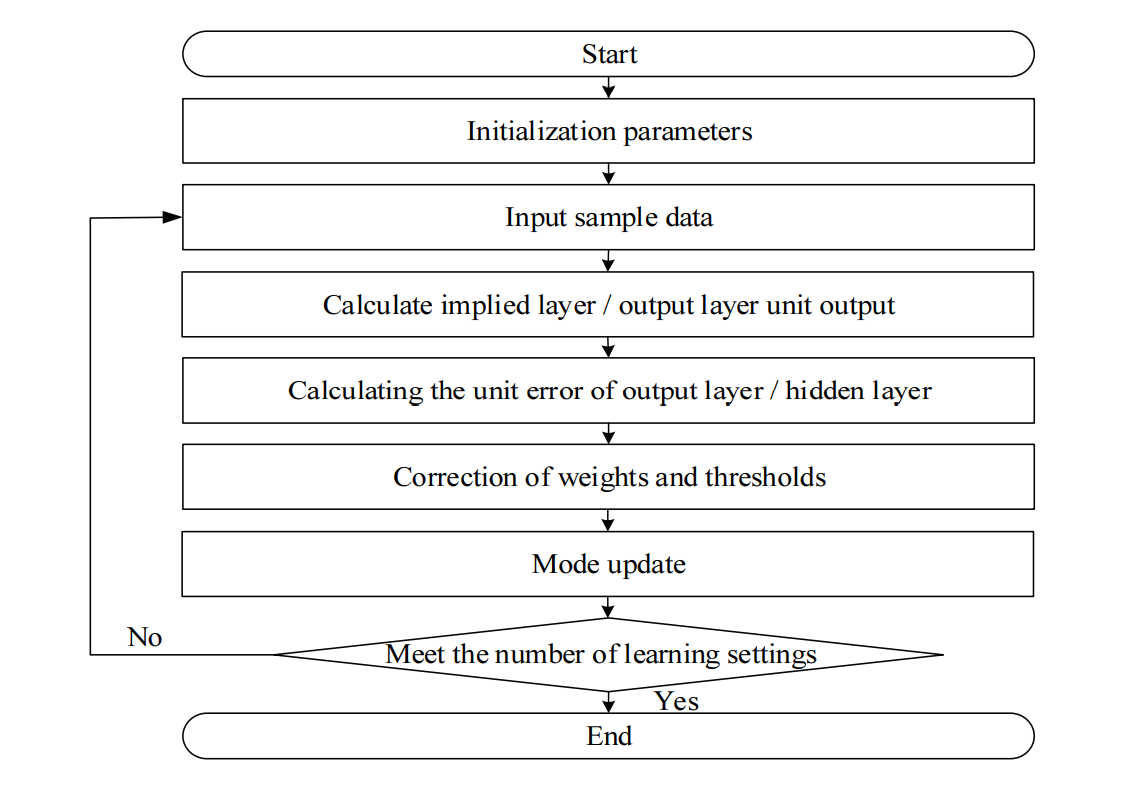
The neural network structure has three input nodes, two hidden nodes and one output node. The specific neural network algorithm flow is shown in Fig. 2 [18-20].
With the definition of neural network data, we optimize the weights and thresholds to combine simulated annealing with neural network. Thus, we establish a quaternion vector according to the task selection, which is denoted as:
In Formula (6), E represents the established quaternion vector; S is the neuron node, which is the initial data set; C is the weight matrix from input layer to hidden layer; Y is the threshold matrix of the hidden layer. The original data is randomly generated during data processing. J represents the product of the weight from the input layer to the first hidden layer and the threshold value from the first to the second hidden layer. The objective function is the output error. The core content is to minimize the loss function. The cooling mechanism is mainly used for controlling the process which is a gradual cooling process, which can be denoted as:
In Formula (7), co represents the cooling mechanism; i is the decreasing step size; κ is the cooling rate, which directly affects the objective function minimization process. The dilemma of local optimization can be solved by adding cooling mechanism into the neural network. Meanwhile, data should be collected from the automatic control model which is established based on the neural network. In this paper, the electrical engineering automatic control system installs sensors to record the running state of the system in real time, collect the values, and transmit the data to the PLC.
3. Experiment
3.1 Experimental Preparation
This paper studies the electrical engineering design method based on neural network and the application of automatic control system. This experiment selects the truss mechanical automation control system as the research object to simulate on-site production and build a simple truss mechanical automation control system platform (Table 1).
Table 1.
| Software | Edition |
|---|---|
| Hardware environment | Intel i3 dicaryon CPU |
| Network environment | 100 M switch |
| HD | 6 TB |
| Operating system | Centors 7.0 |
| Processing element | Intel Xeon 64 @2.33 GHz |
| Dataset sample size | 450 GB |
| Number of program processes | 50 |
| Hadoop | Cloudera Hadop 5.0 |
| Analog programming language | Python |
3.2 Experimental Results and Analysis
The method proposed in this paper serves as the experimental group while the existing electrical engineering automation control method is the control group, thus conducting a comparative experiment. Control Group 1 adopted the method from literature [3], while Control Group 2 utilized the method proposed by literature [4]. For the experimental conditions, the movement time of the manipulator controlled by electrical automation was set at 10 minutes, 30 minutes and 3 hours. The experimental results are shown in Tables 2–4.
Table 2.
| Simulated material | Experience group | Control group 1 | Control group 2 |
|---|---|---|---|
| 1 | 3.64 | 6.04 | 8.44 |
| 2 | 3.58 | 6.57 | 8.72 |
| 3 | 3.72 | 7.82 | 9.56 |
| 4 | 3.86 | 6.65 | 8.29 |
| 5 | 3.29 | 7.38 | 9.63 |
Table 3.
| Simulated material | Experience group | Control group 1 | Control group 2 |
|---|---|---|---|
| 1 | 5.14 | 9.24 | 10.34 |
| 2 | 5.47 | 10.38 | 11.67 |
| 3 | 6.26 | 9.58 | 11.52 |
| 4 | 5.83 | 10.09 | 10.88 |
| 5 | 5.02 | 9.44 | 11.21 |
Table 4.
| Simulated material | Experience group | Control group 1 | Control group 2 |
|---|---|---|---|
| 1 | 12.14 | 18.45 | 19.27 |
| 2 | 12.48 | 19.64 | 19.84 |
| 3 | 11.92 | 18.21 | 19.69 |
| 4 | 12.63 | 18.32 | 20.36 |
| 5 | 12.38 | 19.90 | 19.72 |
According to the experiment results above, that the electrical automation control method based on neural network can significantly reduce the control following error, satisfy the production needs of electrical engineering automation control system, and improve the application effect in industrial production line.
4. Conclusion
Electrical automation control technology provides an advantage for manufacturers to improve labor efficiency and industrial development in China. This paper studies the electrical engineering design method based on the neural network. As the experimental results indicate, electrical automation control technology can effectively reduce the tracking error of electrical engineering automatic control and improve the accuracy of electrical automatic tracking control.
Biography
Zhe Zhang
https://orcid.org/0000-0002-7994-7250
She was born in Qinhuangdao, Hebei, P.R. China, in 1988. She received the Master degree from Hebei University of Science and Technology, P.R. China. Now, she works in College of Information Engineering, Shijiazhuang Vocational College of Finance & Economics. Her research interests include automation control, artificial intelligence, and electrical automation.
Biography
Yongchang Zhang
https://orcid.org/0000-0003-0615-2171
He was born in Cangzhou, Hebei, P.R. China, in 1978. He received the master’s degree from Shijiazhuang Tiedao University, P.R. China. Now, he works in College of Information Engineering, Shijiazhuang Vocational College of Finance & Economics. His research interests include computational intelligence, measurement and control technology, and big data analysis.
References
- 1 D. L. Mon-Nzongo, P. G. Ipoum-Ngome, R. C. C. Flesch, J. Song-Manguelle, T. Jin, and J. Tang, "Synchronous-frame decoupling current regulators for induction motor control in high-power drive systems: Modelling and design," IET Power Electronics, vol. 13, no. 4, pp. 669-679, 2020.doi:[[[10.1049/iet-pel.2019.0222]]]
- 2 F. Heydarpour, E. Abbasi, M. J. Ebadi, and S. M. Karbassi, "Solving an optimal control problem of cancer treatment by artificial neural networks," International Journal of Interactive Multimedia and Artificial Intelligence, vol. 6, no. 4, pp. 18-25, 2020.doi:[[[10.9781/ijimai.2020.11.011]]]
- 3 W. L. Li, "Research on intelligent electric automation control simulation," Microcomputer Applications, vol. 37, no. 1, pp. 127-130, 2021.custom:[[[-]]]
- 4 Q. W. Ding, C. Li, W. B. Y uan, W. X. Hao, and W. Yu, "Effects of heave plate on dynamic response of floating wind turbine spar platform under the coupling effects of wind and wave," Zhongguo Dianji Gongcheng Xuebao/Proceedings of the Chinese Society of Electrical Engineering, vol. 39, no. 4, pp. 1113-1126, 2019.doi:[[[10.1016/j.oceaneng.2020.107103]]]
- 5 H. Fu, T. Jiang, Y . Cui, and B. Li, "Design and operational strategy research for temperature control systems of isothermal compressed air energy storage power plants," Journal of Thermal Science, vol. 28, pp. 204217, 2019.doi:[[[10.1007/s11630-019-1089-5]]]
- 6 F. R. Ismagilov and V . E. V avilov , "Optimization of a high-temperature starter-generator of inverted design for aircraft," Russian Electrical Engineering, vol. 90, no. 5, pp. 391-396, 2019.doi:[[[10.3103/S1068371219050067]]]
- 7 S. Liang, C. Chen, and G. Zou, "Intelligent driving system of robot based on computer vision and neural network algorithm," Journal of Intelligent and Fuzzy Systems, vol. 38, no. 6, pp. 7279-7290, 2020.doi:[[[10.3233/jifs-179803]]]
- 8 Z. A. Obaid, M. T. Muhssin, and L. M. Cipcigan, "A model reference-based adaptive PSS4B stabilizer for the multi-machines power system," Electrical Engineering, vol. 102, no. 1, pp. 349-358, 2020.doi:[[[10.1007/s00202-019-00879-6]]]
- 9 S. Barg and K. Bertilsson, "Multi-objective Pareto and GAs nonlinear optimization approach for flyback transformer," Electrical Engineering, vol. 101, no. 3, pp. 995-1006, 2019.doi:[[[10.1007/s00202-019-00836-3]]]
- 10 C. R. Bharathi, "Design of new asymmetrical cascaded multilevel inverter with reduced number of switches," European Journal of Electrical Engineering, vol. 21, no. 6, pp. 547-552, 2019.doi:[[[10.18280/ejee.210609]]]
- 11 M. Gao, "Application analysis of PLC technology in automatic control of ship auxiliary machinery," Journal of Coastal Research, no. 115, no. SI, pp. 130-132, 2020.doi:[[[10.2112/jcr-si115-039.1]]]
- 12 N. K. Vu and H. Q. Nguyen, "Model order reduction algorithm based on preserving dominant poles," International Journal of Control, Automation and Systems, vol. 19, no. 6, pp. 2047-2058, 2021.doi:[[[10.1007/s12555-019-0990-8]]]
- 13 G. Soorya Priya, and P . Sivakumar, "Analysis of antlion optimizer-based ABT for automatic generation control of an interconnected power system," Soft Computing, vol. 23, no. 18, pp. 8563-8577, 2019.doi:[[[10.1007/s00500-019-04029-9]]]
- 14 S. Owyed, "New exact traveling wave solutions of space-time fractional nonlinear electrical transmission lines equation: arising in electrical engineering," Journal of Intelligent and Fuzzy Systems, vol. 38, no. 3, pp. 2717-2723, 2020.doi:[[[10.3233/jifs-179557]]]
- 15 H. Du, J. Zhai, M. Z. Chen, and W. Zhu, "Robustness analysis of a continuous higher order finite-time control system under sampled-data control," IEEE Transactions on Automatic Control, vol. 64, no. 6, pp. 2488-2494, 2019.doi:[[[10.1109/tac.2018.2867603]]]
- 16 M. Tryputen, V . Kuznetsov, V . Kuznetsov, Y . Kuznetsova, M. Tryputen, and A. Kuznetsova, "Laboratory bench to analyze of automatic control system with a fuzzy controller," Diagnostyka, vol. 21, no. 2, pp. 6168, 2020.doi:[[[10.29354/diag/122357]]]
- 17 L. T. Xiao, M. Y . Li, W. G. Wang, K. W. Hou, and Y . L. Li, "Implementation of FPGA-based controller in automatic control system platform for launch site," Procedia Computer Science, vol. 166, pp. 26-30, 2020.doi:[[[10.1016/j.procs.2020.02.007]]]
- 18 X. Meng, "Model for reliability evaluation of electrical engineering automation with 2-tuple linguistic information," Journal of Intelligent and Fuzzy Systems, vol. 37, no. 2, pp. 1827-1834, 2019.doi:[[[10.3233/jifs-179245]]]
- 19 A. Kebir, L. Woodward, and O. Akhrif, "Real-time optimization of renewable energy sources power using neural network-based anticipative extremum-seeking control," Renewable Energy, vol. 134, pp. 914-926, 2019.doi:[[[10.1016/j.renene.2018.11.083]]]
- 20 N. Zerari and M. Chemachema, "Event-triggered adaptive output-feedback neural-networks control for saturated strict-feedback nonlinear systems in the presence of external disturbance," Nonlinear Dynamics, vol. 104, no. 2, pp. 1343-1362, 2021.doi:[[[10.1007/s11071-021-06351-0]]]